From Spark to Spin: How Motors Turn Energy into Motion
From coils and magnets to clever control, discover how motors turn electrical energy into smooth, useful rotation—powering everything from fans to EVs.
Ignition: The Electric Spark
A motor begins with a push of energy, turning invisible forces into visible motion. When electric current flows through a conductor, it creates a magnetic field; when that field interacts with another magnetic field, a force arises. This is the essence of electromagnetism, and it underpins how motors generate torque. The Lorentz force acts on charges moving in a magnetic field, nudging conductors embedded in coils and causing a shaft to rotate. Voltage provides the electrical push, current carries the flow, and their product is power, the rate at which work is done. Because of conservation of energy, electrical input becomes mechanical output plus inevitable losses, primarily heat. Design choices shape how this conversion happens: the geometry of coils, the strength of the magnetic circuit, and the control of current all tune performance. From this spark of interaction between fields and conductors emerges smooth, controllable motion, ready to drive fans, pumps, tools, and the countless mechanisms that define modern movement.
Stator and Rotor: The Spinning Partnership
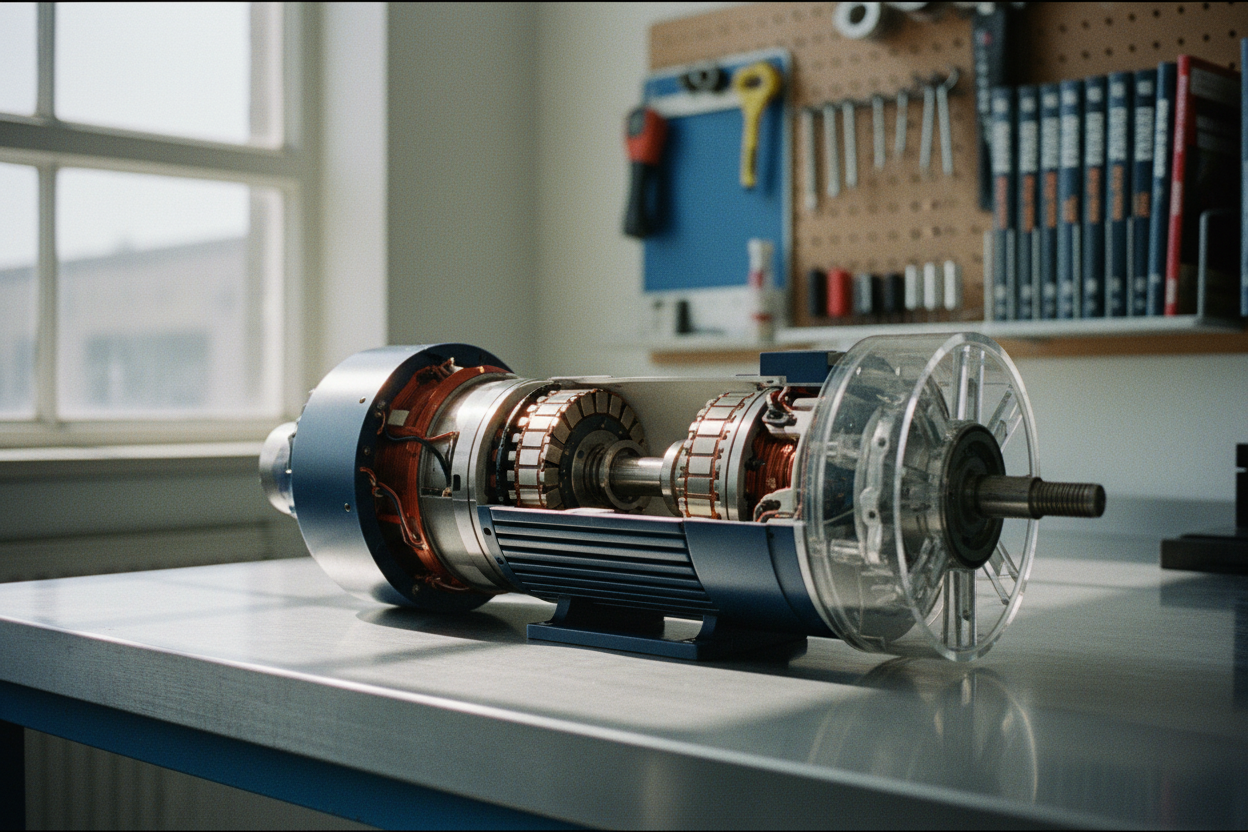
At the heart of most motors sit two collaborators: the stator and the rotor. The stator stays still, hosting windings or permanent magnets that create an organized magnetic field. The rotor turns within a carefully sized air gap, carrying conductors or magnets that respond to the stator's field to produce torque. Magnetic flux flows through a laminated steel path that guides it efficiently, minimizing unwanted eddy currents while strengthening the field where it matters. Torque arises as the rotor seeks alignment, reducing magnetic reluctance and balancing forces across poles. Different architectures tailor this dance: wound-field machines let you tune flux with current; surface-mounted magnets give high responsiveness; interior magnet designs can exploit saliency for extra torque. Even small details shape behavior, from slot geometry to skewing that reduces cogging. Together, stator and rotor form a precisely coupled system where structure, materials, and fields combine to turn static energy patterns into dynamic, reliable rotation.
Commutation and Control
To keep torque steady and direction predictable, motors need commutation: the timed switching of current so magnetic forces keep pulling in the right direction. In brushed DC motors, a commutator and brushes swap connections mechanically as the rotor turns, maintaining alignment of field and conductor. In AC induction machines, a rotating magnetic field in the stator induces currents in the rotor, producing torque without physical switching. Synchronous and brushless DC motors rely on electronic commutation, where semiconductor switches deliver precisely phased currents. Modern drives use pulse-width modulation to shape voltage and current, regulate speed, and control torque with finesse. Techniques like field-oriented control align current with magnetic flux for optimal efficiency and responsiveness. Position feedback via encoders or Hall sensors enables accurate motion profiles; sensorless methods infer position from back electromotive force. Together, these control strategies convert raw electrical supply into smooth, adjustable motion, balancing performance, efficiency, and durability across diverse applications.
Losses, Heat, and Efficiency
Every motor designer wrestles with losses. Copper losses (I²R) heat windings as current meets resistance. Core losses arise from hysteresis and eddy currents in magnetic materials; thin laminations and optimized alloys tame them. Mechanical losses from friction and windage sap power as bearings roll and rotors slice through air. Heat is the universal byproduct, so thermal management becomes mission critical: conductive paths, cooling flow, and validated insulation systems safeguard longevity. Engineers chase higher efficiency with better fill factor, refined slot geometry, reduced leakage flux, and careful magnetic circuit design. In AC machines, improving power factor reduces wasted reactive power, while in brushless systems, cleaner current waveforms trim torque ripple. Operating duty cycle, ambient temperature, and load variability all influence real-world outcomes, so efficiency is a map, not a point. The reward for getting it right is quieter running, lower energy use, higher reliability, and compact torque density that delivers more motion per kilogram and per watt.
Scaling, Torque Density, and Speed
Motor behavior changes as size and speed shift. Torque relates to magnetic shear at the air gap and scales with rotor radius and active length, while speed links to applied frequency or back electromotive force constants. Higher speed can shrink motor size, especially when paired with gearboxes, trading rpm for torque to meet load needs. Direct-drive systems avoid gears for precision and quiet, using larger diameters or higher pole counts to deliver low-speed torque. Thermal limits set the ceiling: as motors grow, volume (and heat generation potential) increases faster than surface area (and heat dissipation), complicating cooling. Choices about rotor inertia affect responsiveness and positioning accuracy; lightweight rotors accelerate quickly, heavy rotors smooth disturbances. Designers balance torque density, efficiency, and control bandwidth, selecting magnets, laminations, and windings to suit goals. From tiny actuators to industrial drives, scaling principles guide how to squeeze the most motion from materials, ensuring the right blend of force, speed, and endurance.
Choosing the Right Motor for the Job
Selecting a motor is about matching characteristics to the load. Start with the torque–speed profile: constant torque, constant power, or variable torque. Consider startup demands, peak versus continuous ratings, and whether a soft start or closed-loop control is needed. Precision applications may call for servo motors with encoders; simple flow systems might prefer robust induction designs. Environmental factors matter: IP ratings, temperature, vibration, and required noise levels shape enclosures and cooling. Maintenance expectations guide choices between brushless systems and brushed options with consumable components. Integration with power electronics, available supply, and safety features like braking or regeneration influence the control strategy. Mechanical interfaces—couplings, alignment, and load inertia—complete the picture. By translating application needs into clear electrical and mechanical targets, you can turn the initial spark of intent into sustained spin, harnessing the principles of electromagnetism, precise control, and thoughtful engineering to convert energy into motion that is efficient, reliable, and fit for purpose.